
|
|
文章詳情
工業機器人的輪廓控制裝置的軌跡控制原理圖介紹 二維碼
603
沿空間連續軌跡控制機械手手爪,必須保證連續地、同步地實現各個坐標。建造輪廓控制裝置有兩種主要方法,這兩種控制裝置的區別在于存儲和計算部分之間的相互關系不同。**種方法是基于以連續軌跡形式按每一個坐標存儲所要求的位置信息。第二種方法是在于以軌跡上有限個主要點(基點)形式存儲位置信息,并且用一定算法以內插法求這些點之間的連續軌跡。在**種情況下,控制位置中沒有計算部件,但為存儲所有軌跡要有大量存儲裝置。在第二種情況下,為存儲各基點,存儲裝置的容量不大,但必須有機計算軌跡的中間各段的計算部件(內插器)。 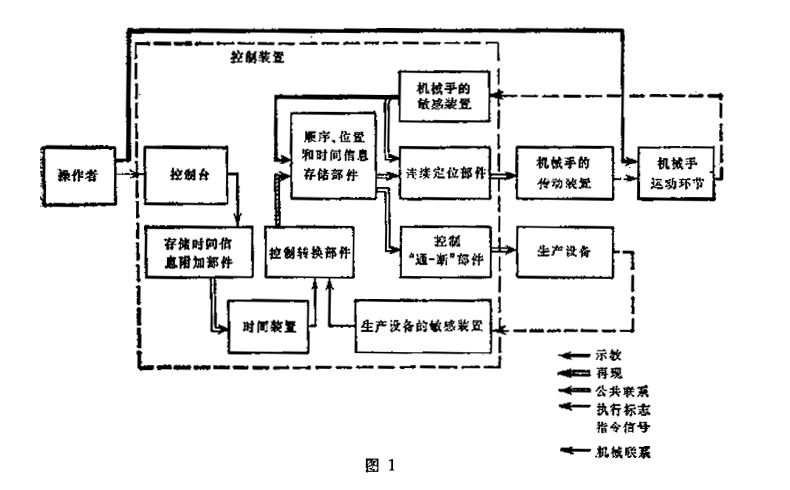 以連續軌跡形式存儲位置信息的工業機器人的軌跡控制原理圖如圖1所示。所有程序信息集中存放在一個存儲順序信息、位置信息和時間信息的部件中。在控制工業機器人對所需要的信息容量不大的情況下,容易將信息存儲到小型存儲裝置的磁帶上(E系列“凡爾薩特蘭”型機器人、“塔里伐”機器人),或者存儲在小型存儲器的磁盤上(“考俄特額-馬蒂克”機器人)。有這類控制系統的機器人直接由操作者用沿要求的軌跡移動機械手的工作機構的方法進行示教。示數時。輸入信息的順序是;操作者-機械手-機械手的感受裝置-存儲裝置。因為執行程序的速度和存儲點位之間的增量成正比,所以當載有程序的器件以等速運動時,在示教過程中時間信息連同位置信息和順序信息一起存儲到存儲裝置中。補充的時間信息(如軌跡的形成速度)用改變載有程序的器件運動速度來引入(E系列“凡爾薩特蘭”機器人、“塔里伐”機器人的控制裝置)。在這種類型的控制裝置中控制轉換的部件乃是磁帶或磁盤的傳動機構,它們能保證載有程序的器件在形成軌跡時一定速度運動。對于其他類型的控制裝置,控制轉換的部件就是處理生產指令和延遲時間的一般線路,用調節載有程序的器件的傳動機構的運動速度的方法引入補充時間信息,其順序是控制臺-時間信息存儲部件-時間裝置。 輪廓控制裝置的控制部件被制造成在隨動狀態響應位置信息的連續定位部件和控制接通-斷開的部件。在連續定位部件中,或者有比較給定的坐標值和瞬時坐標值的電路,或者有給出定量控制作用的電路(在采用步進傳動裝置時)。為了形成軌跡,連續定位部件應對機械手各環節的傳動裝置形成連續控制。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.universehb.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |