
|
|
文章詳情
工業機器人控制裝置的基本部件和原理線路的分析 二維碼
746
現在來分析控制裝置的基本部件,即定位裝置的原理線路。定位裝置(圖1)是用來對給定裝置(是十二位的二進制碼)與瞬時裝置(是相移)進行比較,并形成控制傳動裝置的信號。 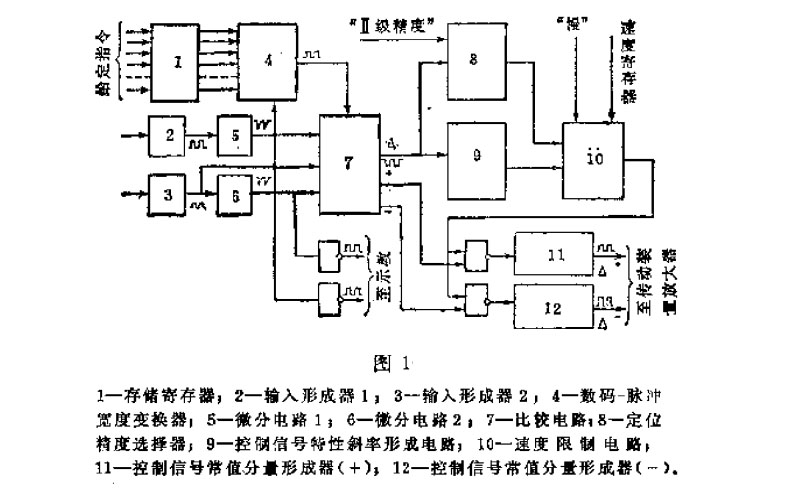 定位裝置包括:存儲寄存器、數碼一脈沖寬度變換器、輸入形成器、微分電路、比較電路、定位精度選擇電路、控制信號特性斜率形成電路、速度限制電路、控制信號異常值分量形成器。 由運算存儲器給定的數碼加到存儲裝置的寄存器中,進而送到數碼-脈沖寬度變換器中。這一變換器是由一個計數器和一個數碼重合電路組成。從數碼-脈沖寬度變換器輸出端給出的位置信號總是帶有相應寬度的脈沖,該脈沖加到比較線路的輸入端。 環節的瞬時位置的信號以幅值為12伏的脈沖從軸-相位變換器加到輸入形成器2中去。由形成器的輸出端取得正極性的、幅值為4伏的脈沖,加給微分電路。當輸入脈沖反向下降時(脈沖后沿),在微分電路中形成短脈沖ф1和ф2脈沖之間的時間間隔比于環節的瞬時位置。 脈沖ф1和ф2從定位裝置傳送到示數裝置,以便形成環節瞬時位置的數碼。脈沖ф1同時還加到數碼脈沖寬度變換器上,以使數碼時間間隔變換電路同步工作。由幾個寄存器和重合電路組成了比較電路,由這電路形成差異信號。差異信號的形成是脈沖的寬度和運動的符號。比較電路輸出的差異信號加到控制信號特性斜率形成電路和定位精度選擇電路上。 控制信號特性斜率形成電路是一個能調節放大系數的脈沖寬度放大器,它能保證形成輸出特性。精度選擇電路是根據延遲脈沖前沿原理進行工作的。當工作在Ⅰ級精度時則沒有延遲。當工作在Ⅱ級和Ⅲ級精度時,脈沖前沿有延遲,它保證在到達給定點之前20′或3°就產生出定位結束信號。 速度限制電路根據被調節設備確定由信號特性效率形成器送來的脈沖的寬度,從而給出了環節運動的**速度。固定不變速度形成器給定環節所具有的低速水平,以這一速度趨于定位點。控制信號常值分量形成器是一個單向振子,它根據輸入脈沖后沿形成速度不變的脈沖。 定位裝置所有電路都以400循環/秒工作,這就保證裝置抗干擾性好。由于有了新型電路,總共用30個微型電路和數量不多的離散組件就可構成完成一整套功能的定位裝置,如完成數碼時間間隔變換。信號比較、被調節的輸出特性的形成、給定執行精度等級等等功能。與用數字方法實現上述功能的情況相比較,電路和組件的數量可以減少近1/2。 按照在“機器人-Д”的裝置中用過的線路技術解決問題的方法,列寧格勒加里寧工學院研制了控制“西格瑪”工業機器人的定位裝置。存儲裝置是由К519系列集成半導體微型電路組成的,這種集成電路能夠電氣更換信息和在電源斷開后保存信息。存儲裝置具有模片形式的結構,并且具有用模片擴展存儲容量的可能性,其容量可由256個十六位數字擴展到**容器2048個十六位數字。機械手運動自由度的位置(坐標)的信息用比較簡潔的方法存儲,即采用了構成長度可變的程序段的方法。當存儲機器人在示教過程中的程序時,不需要執行的運動自由度的坐標就不存入存儲器中。僅僅在必須精確實現位置的情況下方存儲精讀坐標值。為此,在程序段的控制語句中規定實現每一個坐標的標記。能存儲在存儲裝置中的點位的數量N用如下公式計算: N=Q-P/n+1 式中;Q----存儲容量;P----無“運動”指令程序段數;n-----參與運動的坐標平均數(考慮存儲精讀數)。 在“西格瑪”工業機器人機械手控制裝置中,擴大了根據內部和外部條件改變程序過程的能力。這就使得能夠完成裝箱的工作以及根據從生產工段發來的外部信號靈活地改變程序的進程。程序分支由在程序的任何地方加入條件轉移指令來保證。根據緊跟轉移地址后的一個地址完成程序復原。以無條件轉移指令保證程序的自由安排(如增加新的部分,去掉不必要的部分),這種指令同樣也可以加在程序的任何地方。 這種裝置即可以用雙讀數的,也可用單讀數的感應式СКТД-6465Д型、ВТМ-1В型正余弦旋轉變壓器及БС-15A型自整角機進行工作,也可以用具相似線路的其它類型傳感器工作,電路的電源頻率為400赫茲、供電電壓為18伏特時總共需要不大于1安培。傳感器工作在移相狀態。這裝置有成對方式工作的傳感器(旋轉變壓器及自整角機)的信號形成器,信號形成器從裝置中分出來,放置在機械手上靠近傳感器處。一個機械手上可以采用不同類型的傳感器。 制動特性在3”~90”范圍內進行調節,且與各個坐標無關。制動特性可從線性形式變到四次曲線形式。規定在這種裝置這能編制四個定位精度等級的程序。在零級時,定位精度取決于系統測量部分的**分辨率,對Ⅰ~Ⅱ級精度,定位精度分別為±2.6、±20’、±3”。 在控制機械手的傳動裝置時,要保證能平滑地加速和制動。被控坐標數目3~8個,此外還加上手爪的控制。該裝置做成柜臺式結構,尺寸為350×400×1100毫米。裝置的控制-計算部分是以К-155系列集成微電路為基礎,采用有中等集成度的元件制成的。示教和手控臺裝在控制板內,具與控制裝置分開,以便于進行機器人示教。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.universehb.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |